No Escola da Associação de Arquitetura in London arbeiten sie am Graduate Design Programm an Designstudien zu «Behavioral Complexity», vor allem 3D-gedruckte und pneumatische Roboter, die einen einzigen, ganz bestimmten Zweck erfüllen oder nach einem einzigen «simplen» Algorithmus funktionieren. Synergia ist zum Beispiel ein Konzept für programmierbare Materie mit pneumatischen Roboter-Würfel-Schwärmen, OwO sind sowas wie Robot-Maden für den öffentlichen Raum.

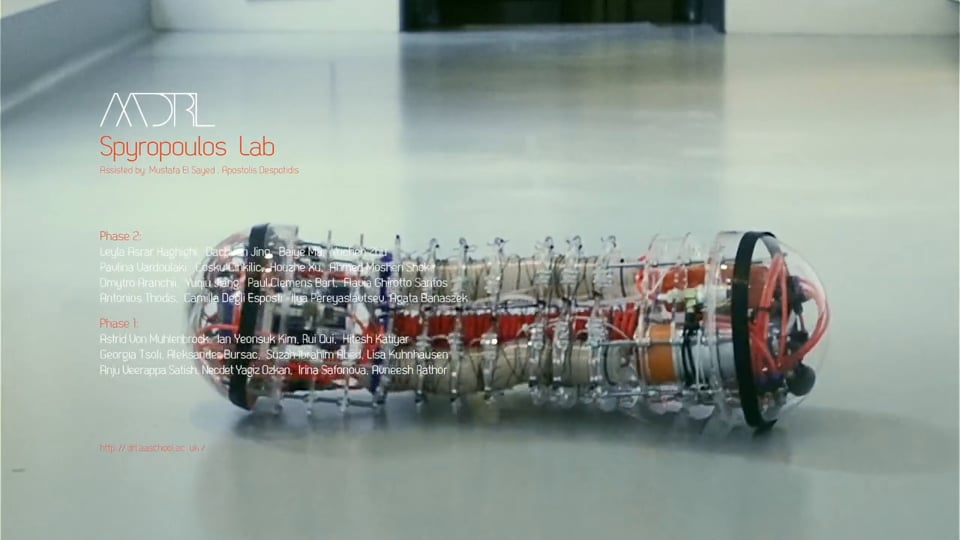
AADRL Spyropoulos Design Lab 2016 (Fase 2)
Aplicativos Criativos tem uma visão geral do Teses finais 2016. Você pode ignorar parcialmente os textos informativos, já que sempre há muitos sinos e assobios de design pretensiosos por parte dos usuários de suéteres de gola alta, mas o trabalho em si poderia na verdade ser para a NASA e seus módulos pneumáticos como esse. Habitat Espacial Bigelow ser interessante.
A seguir está o trabalho do AADRL Spyropoulos Design Lab, que tem explorado sistemas de design baseados em comportamento que são autoconscientes, móveis e autoestruturados e montados. A pesquisa explora agentes de alta mobilidade populacional que evoluem um design que vai além de concepções finitas de espaço em direção a um que co-evolui e se adapta. A pesquisa analisa o desenvolvimento de estratégias de unidades de design inteligente que, por meio da organização, desenvolvem planos corporais que permitem o surgimento de novos comportamentos. Um exemplo disso é o projeto OWO abaixo, que como unidade singular é conceituada como uma unidade que, por meio de pneumática embarcada, permite que a unidade se expanda/contraia, enrole e role. No que diz respeito à mobilidade como unidade individual ela pode rolar no seu modo de mobilidade, mas por exemplo uma unidade se conecta a duas outras unidades então o plano corporal permite uma configuração de tripé, que permite à criatura andar.
Laboratório de Design AADRL Spyropoulos
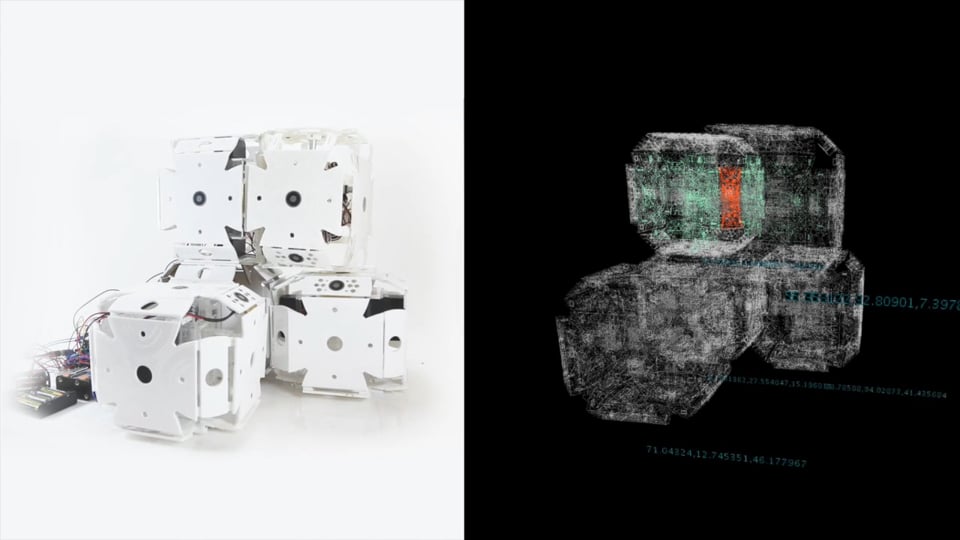
AADRL Spyropoulos_HyperCell
Mais para você:






 "Dravens Tales from the Crypt" encanta há mais de 15 anos com uma mistura insípida de humor, jornalismo sério - para atualidades e reportagens desequilibradas na política da imprensa - e zumbis, guarnecida de muita arte, entretenimento e punk rock. Draven transformou seu hobby em uma marca popular que não pode ser classificada.
"Dravens Tales from the Crypt" encanta há mais de 15 anos com uma mistura insípida de humor, jornalismo sério - para atualidades e reportagens desequilibradas na política da imprensa - e zumbis, guarnecida de muita arte, entretenimento e punk rock. Draven transformou seu hobby em uma marca popular que não pode ser classificada.
Meu blog nunca foi projetado para espalhar notícias, muito menos para ser político, mas com assuntos atuais eu simplesmente não posso deixar de capturar informações aqui que são censuradas em todos os outros canais. Estou ciente de que a página de design pode não parecer "séria" para muitos a esse respeito, mas não vou mudar isso para agradar o "mainstream". Qualquer pessoa aberta a informações não compatíveis com o estado vê o conteúdo e não a embalagem. Eu tentei o suficiente para fornecer informações às pessoas nos últimos 2 anos, mas rapidamente percebi que nunca importa como é "embalado", mas qual é a atitude da outra pessoa em relação a isso. Não quero colocar mel na boca de ninguém para atender expectativas de forma alguma, então vou manter esse design porque espero que em algum momento eu consiga parar de fazer essas declarações políticas, porque não é meu objetivo continuar assim para sempre ![]() Deixo para todos como eles lidam com isso. Você está convidado a copiar e distribuir o conteúdo, meu blog sempre esteve sob a Licença WTFPL.
Deixo para todos como eles lidam com isso. Você está convidado a copiar e distribuir o conteúdo, meu blog sempre esteve sob a Licença WTFPL.
É difícil para mim descrever o que estou realmente fazendo aqui. DravensTales se tornou um blog de cultura, blog de música, blog de choque, blog de tecnologia, blog de terror, blog divertido, um blog sobre itens encontrados na internet, internet bizarra, blog de lixo, blog de arte, aquecedor de água, blog zeitgeist ao longo dos anos , Blog de recados e blog de sacolas de compras chamados. Tudo que está certo ... - e ainda assim não. O foco principal do blog é a arte contemporânea, no sentido mais amplo da palavra.
Para garantir o funcionamento do site, você está convidado a Faça uma doação por cartão de crédito, Paypal, Google Pay, Apple Pay ou débito direto/conta bancária. Muito obrigado a todos os leitores e apoiadores deste blog!